Project S04 - Passive Sub-mm Localization and Tracking System
Principal Investigators: Prof. Dr. Thomas Kaiser
Achieved results in the 1st Phase
Unlike most of indoor localization algorithms that make use of active and synchronized radio nodes like WLAN devices and Bluetooth beacons, S04 in MARIE aims at providing a highly accurate real-time localization system, based on an unsynchronized passive and hence energy-autonomous infrastructure. Motivated by this goal, generous research has been devoted in the 1st phase of MARIE to develop accurate in-room self-localization, based on unsynchronized low-complexity Radio Frequency IDentification (RFID) systems at THz band. Consequentially and in order to design the overall localization system, we have focused in the 1st phase on two main issues: 1) proposing highly accurate localization algorithms, and 2) proposing Dielectric Resonator (DiR)-based Retro-Reflective Tags (RRTs) [1],[2] that build the unsynchronized low-complexity infrastructure.
In this context, we propose in [3] first a Received Signal Strength Indicator (RSSI) based localization algorithm at mm-wave or THz band, which enables a stationary robot equipped with large-scale antennas exploiting RSSI measurements obtained from extremely simple and unsynchronized infrastructure. In this work, the robot is equipped with large-scale antennas in order to improve RSSI based localization, which on the one hand principally suffers from multipath propagation, but on the other hand benefits from the channel hardening of large-scale antennas. The infrastructure in [3] is composed of planar DiR array based reference tags with unique resonance frequency (in close collaboration with C09) [4], where the purpose of the array is to extend the coverage. Although this algorithm offers an acceptable accuracy and high hardware simplicity that is needed for Internet of Things (IoT) applications, it does not meet the requirements of an accurate material map generation with sub-mm spatial accuracy. Moreover, the planar DiR array has a retro-directive Radar Cross Section (RCS) mostly limited to the direction of incidence and therefore restricts its usefulness due to the required numerous DiR arrays for wide localization coverage.
Therefore, our research focus has been moved to time-based localization, since it can theoretically offer the required accuracy due to the available extreme bandwidth in the THz frequency region. Accordingly, we propose in [5] to apply the concept of Roundtrip Time of Flight (RToF) based RFID localization to the THz frequency region in order to achieve the targeted extremely high localization accuracy with unsynchronized infrastructure. RToF based localization technique is of low complexity, since it does not require clock synchronization between the robot and the RRT. At THz frequency with several tens of GHz bandwidth such synchronization would be very hard or even nowadays impossible to be accomplished. RToF accuracy is principally limited by multipath propagation, but the enormous bandwidth in the THz region could eliminate numerous paths except of those originating from the close vicinity of the RRTs. In order to achieve the goal of low complexity and unsynchronized infrastructure and also to overcome the limitation of planar DiR arrays, we propose to combine DiR with a lens as an RRT [6], [7] , [8], [9], [10]. This offers a simple design and wide angle retro-directivity in one plane with an angular limitation between -45˚ to 45˚. Furthermore, the wide THz frequency band provides a large coding capacity for providing sufficient number of bits to uniquely identify each RRT.
The proposed system in [5] provides a framework for accurate localization systems. However, the employed DiR arrays or DiR lens combinations have been found either low in achievable RCS level or still too limited in angular coverage leading to not yet convincing system performance. Moreover, from a system perspective, another important limitation is that the wide frequency sweep range, e.g. realized by a Frequency-Modulated Continuous-Wave (FMCW), cannot provide the full expected range resolution and accuracy because the RRT frequency response is limited to the narrow coding bandwidth around the resonance frequency. To overcome these limitations, further investigations in [11], [12] led to the combination of DiRs with large metallic corner reflectors providing high RCS values over the full bandwidth, a wide angle and still with sufficient coding capacity. In [13], the proposed chipless and unsynchronized infrastructure is further overviewed and also compared, where we present here some representative results that we have achieved while targeting the in-room sub-mm accuracy with a simple infrastructure.
[14] demonstrates the usefulness of the proposed self-localization system in real environments so that a promising solution providing an excellent balance between the high localization accuracy and low system cost has been achieved in 1st phase of MARIE.
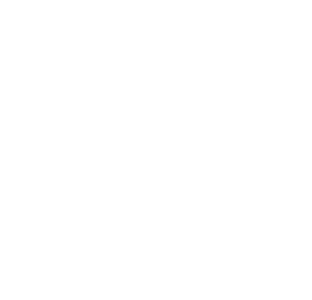
DiR-RRT infrastructure Fig.1 shows the reflection coefficient S11 for three different DiR RRT designs, The coverage relevant quantity RCS is proportional to the reflection coefficient which is measured in front of a horn antenna: The W-band measurements in this section are made using a R&S ZVA67 VNA driving the W-band extender ZC110 which connects to a 25 dBi horn antenna. To increase accuracy and suppress interactions between the DuT and horn antenna, we first perform a waveguide calibration, then transform the measured data by VNA to time domain, isolate the DuT on its rotatable Styrofoam support by time gating and retransform to frequency domain. Finally, plots are taken after so-called empty room subtraction.
Fig. 1A shows a planar array of 9 x 5 DiRs of 0.6 mm diameter bonded to a small sheet of paper by a double-sided adhesive tape [4,13]. The tag reflects the robot’s THz signal in the direction of the incident wave with increased RCS at specific resonance frequencies depending on the DiR design and size, so the coherent superposition of scattering contributions creates strong variation of the RCS signature with the angle of incidence.
Fig. 1B shows a realized lens-DiR combination with measured spectral signatures, where the lens increases the mono-static RCS level at the peak frequency by about 30 dB. To make the lens-DiR combination effective over a wide range of incident angle, more DiRs have to be placed along the focal circle as proposed in [5], [6], [7] ,[8], [9], [13].
Fig. 1: A) Planar array of 9 x 5 DiRs of 0.6 mm diameter in 2.5 mm pitch bonded to a paper support and measured RCS signatures for incidence angle from 0° (normal) to 45°; DUT placed in 75 cm distance to horn antenna. B) Combination of dielectric lens (6 mm dia. from Polyamid) with two DiRs of 0.5 mm diameter glued (product name UHU POR) to a paper-ring around the lens with measured RCS spectral signature compared to signature of single DiR; DUTs placed in 36 cm distance to horn antenna. C) Trihedral corner reflector of 68mm edge length with planar array of 158 DRs of 0.6 mm diameter in a 2.5 mm grid fixed to the corner reflector aperture. Measured RCS spectral signatures for incident angle from 0° to 40° with signature of the reflector without DR array (full line) for comparison; DUT placed in 2 m distance to horn antenna.
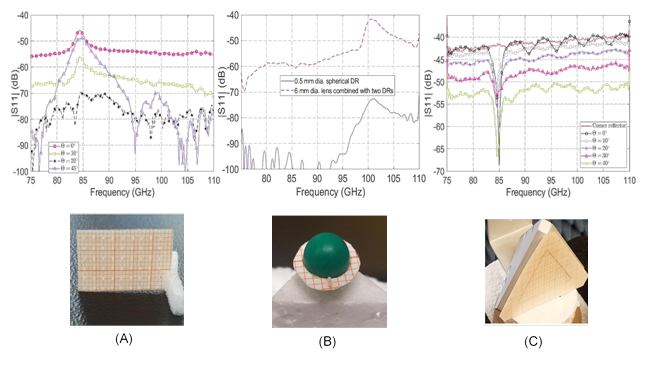
Fig. 1C employs a metal corner reflector with a triangular aperture of 68 mm edge length and with a planar DiR array covering about only half the area of the reflector aperture (158 resonators inside the inscribed triangle of 50 mm side length). We observed a notch, instead of a peak, in the broadband high-level RCS signature of the metal reflectors. The “mechanism” of this was found to be scattering by the DiRs and not absorption which can be shown by simulations with lossless DiRs. More DiRs may be placed on the array plane in order to improve the notch depth, e.g., with 45 DiRs the notch depth is reduced to only about 3 dB [11], [12], [13].
Localization system coverage The molecular absorption in the THz region leads to a partly very high and frequency-selective path loss even for LoS paths. In addition, the inherent RFID forward and backward path loss as well as a low RCS due to the limited tag size make a large coverage of an accurate THz localization system highly challenging. In our proposed solution with RCS-improved DiR-Lens RRTs [5,15], a maximum distance of 11 m can be achieved within the three spectral windows 0.1-0.534 THz, 0.582-0.733 THz and 0.8-0.9 THz with total bandwidth of 0.724 THz, a transmit power of 0 dBm and a processing gain of 40 dB with an antenna aperture of 100 cm2. Note that from a practical point of view, the spectral window 0.1-0.534 THz is more suitable, since on the one hand the required antenna gain can be attained while on the other hand the noise figure is guaranteed to be less than 20 dB. Therefore, the system can be principally designed to operate well with the aforementioned parameter settings and hardware constraints.
Localization system model and evaluation In [5,16], we propose a THz RRT-based self-localization system using RToF for accurate ranging in in-room environments. Here, the RRTs act as reference tags enabling a stationary robot to self-localize. For the same system specifications as above, Fig. 2 presents the Cumulative Distribution Function (CDF) of the localization error for three different bandwidths of a transmitted Gaussian pulse. The localization error is less than 0.713 mm at 98% confidence when the pulse bandwidth equals 10 GHz. This error is increased to 1.45 mm and 1.1 cm at 98% confidence when the pulse bandwidth is decreased to 5 GHz and 1 GHz, respectively. The localization accuracy is improved as the bandwidth of the pulse is increased due to reducing the probability of an overlapping between the required LoS and NLoS paths. The bandwidth is expected to have more effect when the robot antenna gain is decreased due to the existence of stronger NLoS paths and potential multi-tag interference.
Fig. 2: The CDF of localization error for the proposed system for different pulse bandwidths.
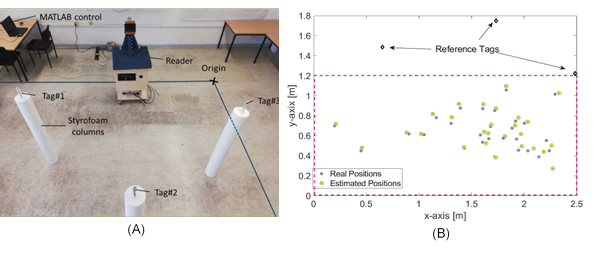
Fig. 3A shows the testbed that we implemented in [14] at 4-6 GHz band in order to evaluate the proposed self-localization system in real environments, where a moveable VNA acts as the robot that we want to localize while the RRTs are precisely located at known positions with respect to a reference point as the origin of the coordinate system. The RRTs are designed as linear arrays of DiRs and supported by Styrofoam columns in a height of 1.5 m above the floor, so that the VNA horn antenna of 20 dBi gain and the RRTs are maintained exactly in the same 2D azimuthal plane. The experimental measurement results shown in Fig. 3B validate the feasibility of the localization system by achieving a high accuracy within a larger area compared to those found in the literature, where an interrogation area of 2.5×1.2 m is considered compared to only 1.2 m2 area observed yet in the literature. The averaged measured location error is approximately 5 cm with a minimum observed error of 0.9 cm and maximum error of 7 cm. An upscaling of the frequencies from low GHz to the THz region suspects the potential of sub-mm accuracy with the proposed localization system.
RRT identification, coding and detection are considered in [17], [18]. It is proposed to reduce the bandwidth used for a single bit and insert in the remaining frequency band some additional bits for error correction. A bit-detection channel model for the RRT coding problem is developed.
Fig.3: A) The whole experimental setup showing the area of measurements, the robot, and three DiR landmarks sitting. B) Estimated positions of the reader in the testbed compared to the real position.
Internal and external collaborations
In phase 1, tight collaboration with C09 has been carried out in order to design the reference tags for the localization system, which had a high impact on the tag identification, tag coverage and the localization accuracy, which led to joint publications [10,13,19]. In the proof of concept and the coverage, the electronic transceivers being designed in C03 and associated projects C01, C02, and C05 have been considered. The proposed tag is also measured and compared using the transceiver of C03 as in [12]. A close cooperation with Dr. Ikki from Lakehead University In Canada has been initiated in [20] under the topic of physical layer security, which is a potential topic for THz communications.
Selected Project-related publications
For all project-related publications please click here and scroll to the S04 section.
[1] A. Alhaj Abbas, A. Abuelhaija and K. Solbach, "Investigation of the transient EM scattering of a dielectric resonator," in 11th German Microwave Conference (GeMiC), pp. 271--274, Mar. 2018.
[2] A. Alhaj Abbas, M. El-Absi, A. Abuelhaija, K. Solbach and T. Kaiser, " investigation of the structural model of scattering of a dielectric resonator," in 2019 Asia Pacific Microwave conference (APMC), Dec 2019.
[3] M. El-Absi, F. Zheng, A. Abuelhaija, A. A. h. Abbas, K. Solbach and T. Kaiser, “Indoor Large-Scale MIMO based RSSI Localization with Low-Complexity RFID Infrastructure,” Sensors 2020.
[4] A. Alhaj Abbas, M. El-Absi, A. Abuelhaija, K. Solbach and T. Kaiser, "Terahertz Passive RFID Tag Based on Dielectric Resonator Linear Array," in 2019 International Workshop on Mobile THz Systems, Bad Neuenahr, Germany, July 2019.
[5] M. El-Absi, A. Alhaj Abbas, A. Abuelhaija, F. Zheng, K. Solbach and T. Kaiser, "High-Accuracy Indoor Localization Based on Chipless RFID Systems at THz Band," IEEE Access, vol.6, pp.54355-54368, 2018.
[6] A. A. Abbas, M. El-Absi, A. Abuelhaija, K. Solbach and T. Kaiser, "High RCS Passive Tag based on Dielectric Resonator - 2D Lens Combination," 2019 12th German Microwave Conference (GeMiC), Stuttgart, Germany, 2019, pp. 5-8, doi: 10.23919/GEMIC.2019.8698178.
[7] Alhaj Abbas, M. El-Absi, A. Abuelhaija, K. Solbach, T. Kaiser, "Wide-Angle RCS Enhanced Tag Based on Dielectric Resonator – Lens Combination", Frequenz, vol.74, no.1-2, 2020. available: https://doi.org/10.1515/freq-2019-0068.
[8] Alhaj Abbas, M. El-Absi, A. Abuelhaija, K. Solbach, T. Kaiser, "Dielectric Resonator–Based Passive Chipless Tag With Angle-of-Arrival Sensing", IEEE Transactions on Microwave Theory and Techniques, vol.67, no.5, pp.2010-2017, 2019.
[9] Alhaj Abbas, M. El-Absi, A. Abuelhaija, K. Solbach, T. Kaiser, " RCS Enhancement of Dielectric Resonator Tag Using Spherical Lens", Frequenz, vol.73, no.5-6, 2019. available: https://doi.org/10.1515/freq-2018-0224.
[10] Y. Zhao, J. Weidemueller, G. vom Bögel, A. Grabmaier, A. Alhaj Abbas, K. Solbach, A. Jiménez-Sáez, M. Schüßler and R. Jakoby, "2D Luneburg Lens Made of Metamaterial for Chipless Dielectric Resonator Tags in the Localization Application," in 2019 International Workshop on Mobile THz Systems, Bad Neuenahr, Germany, July 2019.
[11] Alhaj Abbas, M. El-Absi, A. Abuelhaija, K. Solbach, T. Kaiser, “Metallic reflectors with notched RCS spectral signature using dielectric Resonators,” IET Electronic Letters, vol.56, no.6, pp.273-276, 2020.
[12] J. Barowski, A. Alhaj Abbas, M. El-Absi, L. Piotrowsky, N. Pohl, I. Rolfes and K. Solbach, "Design and Evaluation of a Passive Frequency-Coded Reflector using W-Band FMCW Radar," in German Microwave Conference (GeMiC), Cottbus, Germany, March 2020.
[13] A. Jimenez-Saez, A. Alhaj Abbas, M. Schuler, A. Abuel-Haija, M. El-Absi, M. Sakaki, L. Samfaß, N. Benson, M. Hoffmann, R. Jakoby, T. Kaiser, K. Solbach, “Frequency-Coded mm-Wave Tags for Self-Localization System Using Dielectric Resonators,” Journal of Infrared, Millimeter, and Terahertz Waves, 2020, available: https://doi.org/10.1007/s10762-020-00707-0.
[14] M. El-Absi, A. A. h. Abbas, A. Abuelhaija, K. Solbach and T. Kaiser, “Chipless RFID Infrastructure Based Self-Localization: Testbed Evaluation,” IEEE Transactions on Vehicular Technology, 2020 available: https://ieeexplore.ieee.org/document/9079204
[15] M. El-Absi, A. A. Abbas, A. Abuelhaija, K. Solbach and T. Kaiser, "Distance and Tag Aware Localization in Indoor Terahertz Systems," 2018 First International Workshop on Mobile Terahertz Systems (IWMTS), Duisburg, 2018, pp. 1-5, doi: 10.1109/IWMTS.2018.8454696.
[16] A. Abuelhaija, A. A. Abbas, F. Zheng, K. Solbach and T. Kaiser, "Chipless tags infrastructure based localization in indoor environments," 2018 11th German Microwave Conference (GeMiC), Freiburg, 2018, pp. 267-270, doi: 10.23919/GEMIC.2018.8335081.
[17] Y. Chen, F. Zheng, T. Kaiser, H. Vinck, "An Information-Theoretic Approach to the Chipless RFID Tag Identification", IEEE Access, vol.7, pp.96984-97000, 2019.
[18] F. Zheng, Y. Chen, T. Kaiser, A. J. H. Vinck, "On the Coding of Chipless Tags", IEEE Journal of Radio Frequency Identification, vol.2, no.4, pp.170-184, 2018.
[19] A. Jimenez-Saez, M. Schuler, M. El-Absi, A. Alhaj Abbas, K. Solbach, T. Kaiser, and R. Jakoby, “Frequency Selective Surface Coded Retroreflectors for Chipless Indoor Localization Tag Landmarks,” IEEE Antennas and Wireless Propagation Letters, vol.19, no.5, pp.726-730, 2020.
[20] T. Deeb, M. El-Absi, A. Salhab, S. Ikki, S. Zummo, and T. Kaiser, "Physical Layer Security of Interference Aligned Mixed RF/UnifiedFSO Relaying Network." IET Communications (2020).
[21] A. Alhaj Abbas, M. El-Absi, A. Abuelhaija, K. Solbach, T. Kaiser, "Corner Reflector with RCS Frequency Coding by Dielectric Resonators", IET Microwaves, Antennas & Propagation, August 2020.