Project S03 - Space-Time Signaling for MIMO Radar Imaging with Reconfigurable Intelligent Surfaces
Principal Investigators: Prof. Dr. Daniel Erni, UDE / Prof. Dr. Aydin Sezgin, RUB
Achieved Results in the 1st Phase
An important aspect is the proper handling of vortex beams in corresponding settings for reflectometry-based material characterization, which turned out to be challenging as their beam divergence increases with higher OAM mode orders. An initial question therefore concerns the generation of vortex beams and in particular of narrow OAM pencil-beams, where the latter has been investigated in the 1st phase using both, tailored lenses [6, 7] and modified reflectors [7]. The spatially separated excitation of OAM mode orders has very recently turned out to be very promising in this regard irrespective the increased complexity of the resulting antenna structure [1], where reflective antennas based on reconfigurable metasurfaces (i.e. RIS) are currently conjectured to have the largest potential for OAM narrow beam generation [2-5]. A further advantage of vortex beams is their capability to resolve (e.g. dihedral) structural symmetries in material surfaces and objects by reflection-based OAM spectroscopy. This interplay between structured beams and structured reflection objects raises new research questions and offer an interesting opportunity to discern between retrieved information and clutter signals in passive RFID systems for e.g. localization. This question has been successfully addressed in 1st phase using vortex readout beams in conjunction with OAM-coded RFID tags [8, 9]. Narrow OAM beam generation and functionalized surfaces are now explored in the 2nd phase in the framework of RIS. RIS-based beam processing can be therefore conceptualized as the most flexible paradigm in space-time signaling for MIMO radar material characterization.
In the 1st phase, we explored the applicability of vortex waves with different OAM modes for MIMO reflectometry-based material characterization and object sensing. The conceptual research carried out here encompasses (i) tailored antenna designs for vortex beam generation, (ii) vortex beam reflectometry, and (iii) beam-steering concepts with Liquid Crystals (LC) for both, Leaky Wave Antennas (LWAs), and reflect arrays.
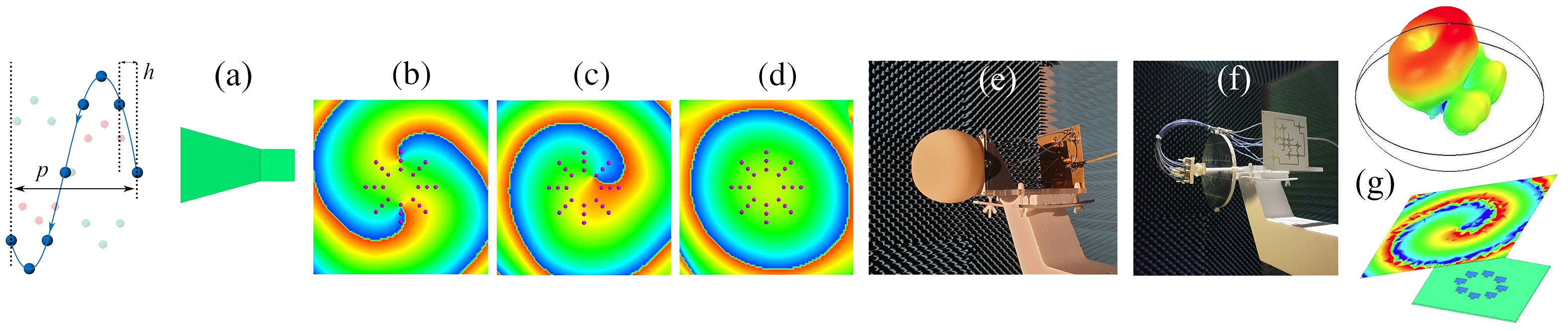
Vortex beam generation: The large beam divergence of vortex beams especially towards higher OAM mode orders (together with the intensity zero in the very center of the beam) turned out to be the major challenge in any kind of vortex beam processing. Starting from basic planar OAM emitters such as elliptical patch antennas supporting hybridized dual-mode operation and circular antenna arrays with Butler matrix-controlled helical phase relation, we investigated various antenna concepts to cope with the very peculiarity of OAM beams while counteracting the beam divergence. This includes e.g. nested circular arrays, compact Cassegrain configurations with particularly tailored non-parabolic reflectors (cf. Fig.1(f)), and novel tailored lens antennas [6] (cf. Fig.1(e)) yielding gain improvements up to 5.5dB. A further investigation provided novel phased-array concepts for wide-angle OAM beam steering (yielding ranges up to ±58°) based on circular arrays with particular element topologies [10] (cf. Fig.1(g)).
Vortex beam reflectometry: Vortex beams with different OAM orders have correspondingly altered helical phase fronts in the cross-section of the main lobe, which may provide an increased sensitivity against (sub-) surface textures within a reflectometry setup. This advance is offset by the observation, that vortex wave spectroscopy using a finite set of different OAM orders is difficult to operate as the global symmetry inherent to the OAM modes renders any bistatic setup to become equally sensitive to misalignment. Therefore, monostatic object/material sensing/imaging using OAM-based radar is currently analyzed using computational Electromagnetics (EM) channel models (S03.b) in conjunction with Fast Fourier Transform (FFT) and Multiple Signal Classification (MUSIC) algorithms (S03.a). Using now helically structured objects, we have also shown that the OAM mode orders of both, the incident and reflected vortex beam together with the impressed OAM mode order of the object are interlinked by a simple «algebra» due to OAM conservation [8]. This opens the field for innovative object sensing/location schemes which allows for an inherent distinction between wanted signal from clutter and enables even more complex applications such as e.g. chipless OAM-coded RFID tags [9] (cf. Fig.1(a)-(d)).
Beam steering in LWAs and reflect arrays: Metamaterial-based LWAs, which are bent into a ring topology have already proven an alternative approach to OAM wave excitation [11]. In order to control the OAM mode order of the emitted vortex beam, wide-angle beam steering is needed. In the following we have investigated the prerequisites for large scanning angles in LWAs using e.g. (i) LC-controlled unit cells in conjunction with extra elements to enhance the dispersion sensitivity [12] (scanning angle 47°), or (ii) the need for matching radiation patterns stemming from the two dual elements in the unit cell of a Substrate Integrated Waveguide (SIW) LWA for circularly polarized wave emission [13] (scanning angle 65°). Balanced LC designs of hybrid approaches using series-coupled patch antennas and meander line phase shifters yielded a scanning angle up to 41° [14]. Omnidirectional beam scanning has been investigated in circular antenna arrays using varactor-controlled feeding networks [15]. Most of these concept studies are carried out for down-scaled operating frequencies in the GHz range, whereas our proposal for a metasurface-based tensorial sensor for LC material characterization [16] operates in the THz range (280-330GHz). In [17] we proposed a realistic concept for true 2D beam scanning in a LC-based reflect array with 32x30 multi-resonant elements and optimized driving network yielding large scanning angles (y-z: 40°, x-z: 50°) in the mm-wave band (90-120GHz), while in [18] a holographic metasurface reflect array has been numerically investigated for the 1.4-2THz band. Both studies are therefore contributing as preliminary work to the proposed research on RIS.
Fig.1: (a) Schematic of a OAM RFID tag with 3 helical arrays of dielectric resonators illuminated by a horn antenna [9], (b)-(d) phase relations of the simultaneously reflected beams for an OAM tag code (–2,1,0) [9], (e) tailored OAM lens antenna concept [E], (f) tailored OAM reflector antenna concept (both for narrow-beam operating at 10 GHz), and (g) beam-steering pattern of a 1st order OAM beam from a circular antenna array [10].
References
[1] F. Qin, L. Li, Y. Liu, W. Cheng, H. Zhang, "A four-mode OAM antenna array with equal divergence angle," IEEE Antennas Wireless Propag. Lett., 18(9), 1941, 2019.
[2] L. Zhang, et al, "Spin-controlled multiple pencil beams and vortex beams with different polarizations generated by Pancharatnam-Berry coding metasurfaces," ACS Appl. Mater: Interfaces, 6(5), 1701094, March 5, 2018.
[3] Q. Ma, C. B. Shi, G. D. Bai, T. Y. Chen, A. Noor, T. J. Cui, "Beam-editing coding metasurfaces based on polarization bit and orbital-angular-momentum-mode bit," Adv. Opt. Mater., 6(23), 1700548, Dec. 2017.
[4] I. Brener, S. Liu, I. Staude, J. Valentine, C. Holloway, (Eds), Dielectric Metamaterials – Fundamentals, Designs, and Applications, Duxford (UK): Elsevier, 2020.
[5] F. Yang, Y. Rahmat-Samii (eds.), Surface Electromagnetics. Cambridge: Cambridge University Press, 2019.
Selected Project-related publications
For all project-related publications please click here and scroll to the S03 section.
[6] M. Haj Hassan, B. Sievert, A. Rennings, D. Erni, "Reducing the divergence of vortex waves with a lens tailored to the utilized circular antenna array," 2nd Int. Workshop on Mobile THz Systems (IWMTS 2019), 2019.
[7] M. Haj Hassan, B. Sievert, J. T. Svejda, A. M. Ahmed, J. Barowski, A. Rennings, I. Rolfes, A. Sezgin, and D. Erni, "Beam divergence reduction of vortex waves with a tailored lens and a tailored reflector," arXiv: 2007.05462, (https://arxiv.org/abs/2007.05462), 2020.
[8] M. Haj Hassan, B. Sievert, A. M. Ahmad, A. Alhaj Abbas, A. Rennings, K. Solbach, T. Kaiser, A. Sezgin, D. Erni, "Orbital angular momentum mode order conversion with helically arranged spherical dielectric resonator arrays," IEEE Workshop 2020/SENSORICA 2020, Mülheim a. d. Ruhr, Germany, 2020.
[9] M. Haj Hassan, A. Alhaj Abbas, A. Jiménez Saéz, A. Mostafa Ahmed, B. Sievert, M. Schuessler, A. Rennings, K. Solbach, T. Kaiser, R. Jakoby, A. Sezgin, D. Erni, "Passive orbital angular momentum RFID tag based on dielectric resonator arrays," IWMTS 2020, July 2-3, Essen, Germany, 2020.
[10] M. Haj Hassan, M. Al-Mulla, B. Sievert, A. Rennings, D. Erni, "Evaluation of different phased array approaches for orbital angular momentum beam steering," 13th German Microwave Conference (GeMiC 2020), 2020.
[11] A. Al-Bassam, M. A. Salem, C. Caloz, "Vortex beam generation using circular leaky-wave antenna," APS/URSI 2014, July 6-11, Memphis, USA, 2014.
[12] S. Ma, G.-H. Yang, D. Erni, F.-Y. Meng, L. Zhu, Q. Wu, J.-H. Fu, "Liquid crystal leaky wave antennas with dispersion sensitivity enhancement," IEEE Trans. Compon. Packag. Manuf. Technol., 7(5), 792, 2017.
[13] L.-Y. Lyu, F.-Y. Meng, G.-H. Yang, D. Erni, Q. Wu, K. Wu, "Periodic SIW leaky-wave antenna with large circularly polarized beam scanning range," IEEE Antennas Wireless Propag. Lett., 16, 2493, 2017.
[14] S. Ma, S.-Q. Zhang, L.-Q. Ma, F.-Y. Meng, D. Erni, L. Zhu, J.-H. Fu, Q. Wu, "Compact planar array antenna with electrically beam steering from backfire to endfire based on liquid crystal," IET Microw. Ant. Propag., 12(7), 1140, 2018.
[15] P.-Y. Wang, T. Jin, F.-Y. Meng, Y.-L. Lyu, D. Erni, Q. Wu, L. Zhu, "Beam switching antenna based on a reconfigurable cascaded feeding network," IEEE Trans. Antennas Propagat., 66(2), 627, 2018.
[16] P.-Y. Wang, T. Jin, F.-Y. Meng, Y.-L. Lyu, D. Erni, Q. Wu, L. Zhu, "Numerical investigation of nematic liquid crystals in the THz band based on EIT sensor," Opt. Express, 26(9), 12318, 2018.
[17] J.-X. Li, T. Jin, D. Erni, F.-Y. Meng, Q. Wu, W.-N. Li, "Design and numerical demonstration of a 2D millimeter-wave beam-scanning reflect array based on liquid crystals and static driving technique," J. Phys. D: Appl. Phys., 52, 275103, (2019).
[18] P.-Y. Wang, F.-Y. Meng, Y.-L. Lyu, B. Sievert, A. Rennings, D. Erni, "Holographic metasurface reflect array for Terahertz radiation," 42nd Progress in Electromagnetics Research Symposium (PIERS 2019), 2019.